3.4 Електронні диференційно-трансформаторні прилади
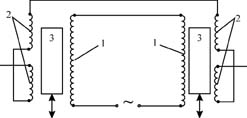
Електронні диференційно-трансформаторні прилади призначені для автоматичного виміру, запису і регулювання різних неелектричних величин (тиску, розрядження, рівня, витрат тощо), зміна яких може бути перетворена за допомогою чутливих елементів (мембран, сильфонів, дифманометрів, поплавців та ін.) на лінійне переміщення. Прилади цього типу працюють у комплекті з індукційним датчиком, що забезпечує перетворення неелектричної величини на електричну. Датчик з чутливим елементом монтується в об'єкті, на якому здійснюється автоматичний контроль чи регулювання. Вимірювальний пристрій приладу виконаний за диференційно-трансформаторною (індукційною) схемою (рис. 3.10), яка складається з двох індукційних котушок, включених відповідним чином в одну схему і розташованих одна в індукційному датчику, інша – у приладі.
Кожна котушка має по одній первинній і вторинній обмотці. Первинна обмотка живиться перемінною напругою 33 В від трансформатора підсилювача.
Вторинні обмотки виконані у вигляді двох секцій, кожна з яких розташована на половині всієї довжини котушки і має однакову кількість витків. Кінці кожної секції вторинної обмотки з'єднані між собою так, що ЕРС, яка індукується в одній із секцій, має напрямок, зворотній ЕРС, яка індукується в іншій. Усередині кожної котушки є сердечник, виконаний з м'якого заліза, довжина якого менше котушки, що забезпечує можливість його переміщення.
Рис. 3.10 – Індукційна схема виміру: 1 – первинна обмотка; 2 – вторинна обмотка; 3 – сердечник
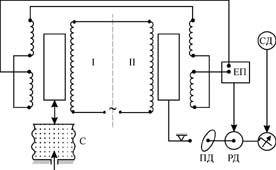
Рис. 3.11 – Принципова схема електронного приладу з індукційною схемою: С – сильфон: ПД – профільований диск; РД – реверсивний двигун; СД — синхронний двигун
Коли сердечник знаходиться в котушці в середньому положенні, ЕРС, що індукується в кожній із секцій, рівні, спрямовані назустріч одна одній і взаємно компенсуються. Між началами вторинних обмоток напруги не буде, оскільки обидві котушки з'єднані послідовно і вироблювані в них ЕРС спрямовані також назустріч одна одній, то й результуюча різниця напруги на вихідних затисках вимірювальної схеми електрично урівноважена. Якщо ж сердечник зміститься від середнього положення під впливом чутливого елемента (унаслідок зміни регульованої величини), то магнітний потік, що пронизує вторинну обмотку, виявиться різним для секцій, у результаті чого ЕРС, що індукуються в них, не будуть рівні (ЕРС однієї збільшується, другої зменшується). Фаза і величина результуючої ЕРС залежить від напрямку зсуву сердечника. При змінах положень сердечників у котушках I і II з'явиться напруга небалансу, яка подається на вхід електронного підсилювача (рис. 3.11).
Посилений сигнал подається на обмотку управління реверсивного двигуна, ротор якого, обертаючись, пускає в хід укріплений на його осі профільований диск і сердечник котушки II у бік зменшення неузгодженості доти, поки ЕРС І і II котушок не будуть рівні. Одночасно реверсивний двигун пускає в хід стрілку, що показує, і записуюче перо. Синхронний двигун спричиняє обертання діаграми.
Промисловістю випускаються електронні потенціометри індукційної дії з записом на дисковій діаграмі зі шкалою, що показує, нормального або тропічного виконання: КСД1, КСД2, КСД3, КВПД (із серії ГСП).