Розділ 3. Електронні прилади контролю технологічних параметрів
На практиці, при автоматизації виробничих процесів, використовуються різні електронні прилади контролю і регулювання технологічних параметрів, але для контролю і регулювання температури найчастіше застосовують електронні автоматичні мости і потенціометри. Слід особливо зазначити можливість використання цих приладів у схемах автоматичного захисту.
3.1 Електронний автоматичний урівноважений міст
Урівноважений міст призначений для безупинного виміру, запису та регулювання температури. Він працює в комплекті з термометрами опорів стандартних градуювань, тобто має відповідність заданої межі виміру – градуювання термометра опорів. Це означає, що кожному приладу відповідає певна група термометрів опорів єдиного градуювання. Сутність дії термометрів опору заснована на залежності його електричного опору від температури.
Принципова вимірювальна схема розглянутого приладу – мостова. Виміри неелектричних величин електричними методами дуже широко поширені в електротехніці й автоматиці. Слід зазначити, що мостова вимірювальна схема використовується більше 100 років, а можливість виміру і фізична сутність роботи її вперше розглянуті в роботах французького дослідника Шарля Кристі (1833 р.) і приблизно в ці ж роки англійським дослідником Уїнстоном.
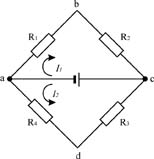
Різноманіття мостових схем базується на класичній мостовій схемі, що являє собою кільце опорів (рис. 3.1). Опори з'єднані так, що утворюють вершини моста а, b, с і d, діагональ живлення ас і діагональ виміру bd.
Рис. 3.1 – Схема рівноважного моста: R1, R2, R3, R4 – резистори; ас – діагональ живлення; bd – діагональ виміру
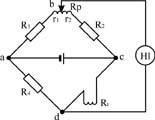
Рис. 3.2 – Вимірювальний міст: Rp – реохорд; НІ – нуль-індикатор
Вимір заснований на дотриманні певного співвідношення між опорами (плечима) мосту, називаного умовою рівноваги.
Під умовою рівноваги мається на увазі таке співвідношення опорів моста, при яких на вершинах вимірювальної діагоналі різниця потенціалів Ubd = 0 і в ланцюзі виміру відсутній вихідний сигнал. Стану Ubd = 0 відповідає рівність падінь напруг відповідно в прилеглих плечах, тобто
U1 = U4 і U2 = U3 (3.1)
За законом Ома
U1 = J1R1; U2 = J1R2; U3 = J2R3; U4 = J2R4. (3.2)
Підставляючи в рівність падінь напруг (3.1) їх значення, виражені через струми й опори (3.2), і поділивши почленно, одержимо:
 (3.3)
(3.3)
або, скоротивши значення струмів J1 і J2, маємо рівність:
R1R3 = R2R4, (3.4)
яке називається класичною умовою рівноваги мостової схеми, що читається так: “Якщо добутку опорів протилежних плечей мостової схеми рівні між собою, то на вершинах вимірювальної діагоналі відсутня різниця потенціалів”. Цей метод називається нульовим методом виміру опорів.
Принципова схема рівноважного моста наведена на рис. 3.2.
Мідний чи платиновий термометр опору Rt, величина електричного опору якого повинна бути обмірювана, включається в одне з плечей моста за допомогою сполучних проводів, що мають опори Rл. Інші плечі моста складаються з постійних манганінових опорів R1, R2, R4 і перемінного каліброваного опору реохорда Rp, виконаного також з манганіну. До однієї діагоналі моста підведене живлення постійного або перемінного струму, в іншу включений нуль-індикатор. При рівновазі моста задовольняється рівність:
R1Rt = R2R4, (3.5)
відкіля з урахуванням опорів реохорда r1 і r2 запишемо:
(R1 + r1)Rt = (R2 + r2)R4. (3.6)
У цьому випадку різниця потенціалів між точками bd дорівнює нулю, струм не протікає через нуль-гальванометр і його стрілка установиться на нульовій позначці. При зміні температури величина електричного опору термометра опору зміниться і міст розбалансується. Щоб відновити рівновагу, необхідно за постійних опорів R1, R2 і R4 змінити величину опору реохорда, перемістивши його рухливий контакт.
Таким чином, якщо відкалібрувати опір реохорда, то за положенням його движка при рівновазі моста можна судити про величину опору Rt, отже, про вимірювану температуру.
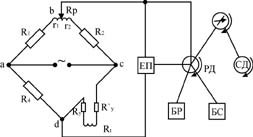
Рис. 3.3 – Схема рівноважного електронного моста: ЕП – електронний підсилювач; РД – реверсивний двигун; СД – синхронний двигун
Розглянемо принципову схему автоматичного електронного самописного рівноважного моста перемінного струму (рис. 3.3). За зміні температури середовища, у якій знаходиться термометр опору Rt, зміниться температура термометра і, отже, величина його електричного опору. При цьому вимірювальний міст, що складається з постійних та перемінних опорів (R1, R2 і R4) і живиться (6,3 В) від однієї з обмоток силового трансформатора, розбалансується, і в діагоналі моста між точками b і d з'явиться напруга небалансу Ubd. Остання подається на вхід електронного підсилювача ЕП, де підсилюється по напрузі і потужності, потім надходить на реверсивний двигун РД і надає руху його ротору. Обертаючи в той чи інший бік, залежно від знака розбалансу, ротор реверсивного двигуна переміщає механічно з ним зв'язаний движок реохорда Rp, стрілку і перо по шкалі приладу доти, поки вимірювальний міст не прийде в стан рівноваги. Напруга на вході електронного підсилювача ЕП в цьому випадку стане рівною нулю, електродвигун РД зупиниться, а прилад покаже вимірювану температуру.
Точність показань приладу залежить від припасування опорів проводів, що з'єднують термометр опору з автоматичним рівноважним мостом. Для припасування опорів сполучних проводів до градуювального значення служать опори Ry і R'у величиною до 2,5 Ом кожний. При градуюванні приладів опір кожного проводу, що йде від термометра до приладу, прийнятий 2,5±0,01 Ом. Якщо опір кожного проводу буде менший 2,5 Ом, то в сполучну лінію послідовно включається додатковий опір, що доповнює опір кожного проводу до 2,5 Ом.
У виробничих умовах термометр опору може знаходитися на значному видаленні від вторинного приладу, при коливаннях температури середовища величина їх опору буде змінюватися, що приведе до додаткової погрішності в показаннях автоматичного рівноважного моста. Для усунення зазначеної погрішності застосовується трьохпровідна схема з'єднань термометра опору з вторинним приладом, яка полягає в тому, що точка С (рис. 3.4) переноситься безпосередньо до термометра опору. При такому з'єднанні опір проводу Rl1 додається до плеча вимірювального моста, а опір Rl2 – до плеча з постійним опором. Тоді умова рівноваги мостової схеми буде мати вигляд:
(R1 + rR1)(Rt + Rl1) = (R2 + rR2 + Rl2)R4. (3.7)
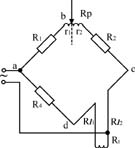
Рис. 3.4 – Трьохпровідна схема включення термометра опору
Вимірювальна схема автоматичного рівноважного моста може також живитися від сухої батареї постійного струму або від акумулятора з напругою 1,2–1,5 В. У такому випадку електронний підсилювач приладу повинен мати віброперетворювач для перетворення сигналу небалансу постійного струму на перемінний з метою його наступного посилення.
У зв'язку з цим рівноважні мости постійного струму застосовуються з можливою появою у вимірювальному ланцюзі різних наведень (наприклад, при монтажі термометра опору в електропечах чи місцях з великими магнітними полями). Крім того, мости постійного струму використовують у тих випадках, коли за умовами експлуатації приладів і пожежної безпеки їх живлення здійснюється малопотужними джерелами постійного струму.
Конструктивно автоматичний самописний рівноважний міст являє собою стаціонарний прилад, усі вузли якого розміщені у середині сталевого корпуса. Запис показань здійснюється на діаграмному папері, який переміщується синхронним двигуном.
Промисловість випускає автоматичні рівноважні мости, які показують і записують на дисковій діаграмі; мости КСМ2, КСМЗ, КСМ4, які показують і записують на стрічковій діаграмі; мости, що показують, з обертовою шкалою, та інші модифікації. Принципові схеми їх подібні розглянутій схемі автоматичного рівноважного моста і відрізняються вони одна від одної тільки конструкцією окремих вузлів.
Однак розглянутий вище тип електронного приладу має і ряд недоліків: